Während meiner Schulzeit kam das erste Interesse für elektrotechnische Themen auf. Ich wollte die Facharbeit in der Kollegstufe nutzen, um mich länger mit einem konkreten Projekt zu beschäftigen. Der Leistungskurs Physik war hierzu perfekt geeignet. Mein Thema der Arbeit legte ich dann gemeinsam mit dem betreuenden Lehrer auf „Die Magnetschwebebahn Transrapid – Bau eines Modells“ fest.
Die Facharbeit war die erste ernsthafte Möglichkeit, selbständig ein umfassenderes Thema zu bearbeiten. Alle Schüler erhielten hierzu ein Jahr Zeit. Ich begann zunächst damit zu recherchieren, wie die Technik funktioniert. Im Internet und in Fachbüchern gab es genug Informationen. Da für mich die praktische Tätigkeit im Vordergrund stand, konnte ich dann nach der Literaturrecherche meine ganze Energie in den Bau der Modelle investieren.
Fahrweg
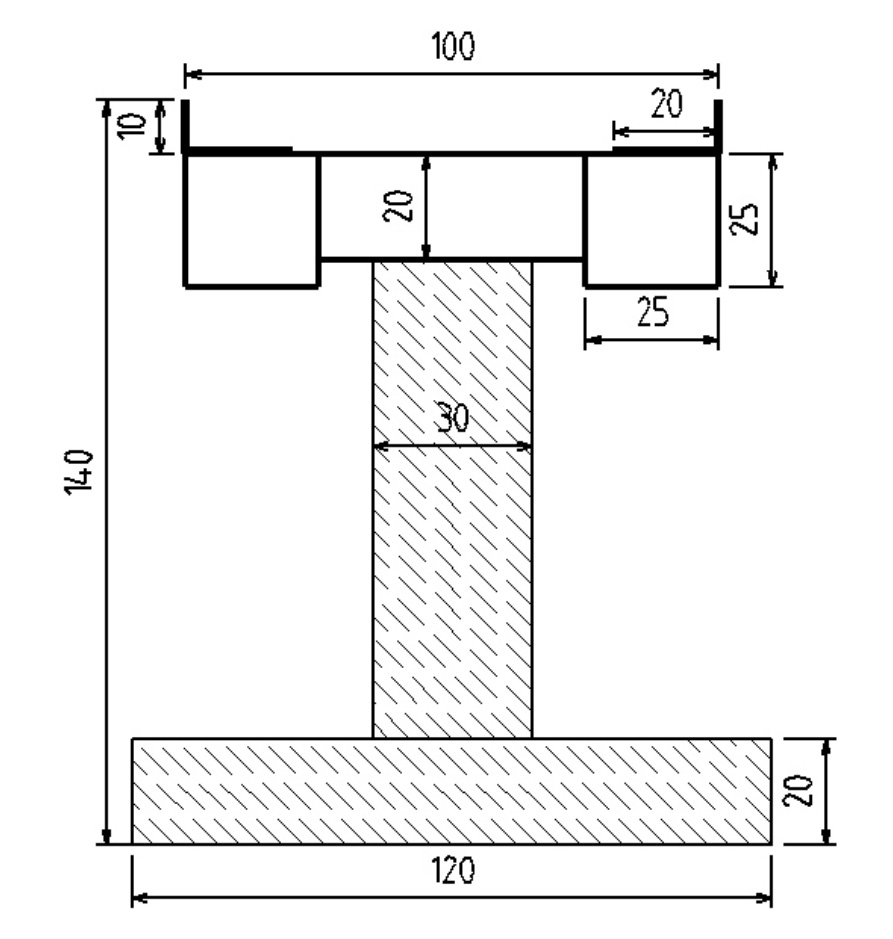
Abbildung 1: Fahrweg
Genau wie das Original sollte mein Modell an einer Schiene schweben. Bei deren Konstruktion legte ich Wert darauf, dass ich auf Material aus dem Baumarkt zurückgreifen konnte. Aus verschiedenen Metallprofilen und einer Ständerkonstruktion aus Holz, fertigte ich den Fahrweg. Abbildung 1 zeigt den Querschnitt durch den Aufbau. Links und rechts sind quadratische Stahlprofile befestigt, an denen sich das Fahrzeug später per magnetischer Kraft heranziehen sollte. Verbunden waren die Profile über ein rechteckiges Aluprofil, welches auf dem Holzträger befestigt war. Zwei weitere, L-förmige Aluprofile waren oben befestigt, damit später der Schwebe-Abstand per Lichtschranke detektiert werden kann.
Mit den Metallprofilen gelang es tatsächlich einen Fahrweg zu bauen, der nur sehr geringe Toleranzen aufwies. Außerdem waren sämtliche Teile recht massiv, so dass auch unter Last kein spürbares Verbiegen stattfand. Die Schraubverbindungen der einzelnen Profile trugen auch zur Stabilität bei.
Fahrzeug

Abbildung 2: Fahrzeug-Modell
Die nächste Herausforderung waren Entwurf und Bau des Fahrzeugs. Wichtigstes Element sind dabei die Elektromagnete. Sie stellen die Kraft zur Verfügung, um das Fahrzeug an die Schiene zu ziehen, ohne diese zu berühren. Ich experimentierte längere Zeit mit verschiedenen Magnet-Konfigurationen. So stellte ich recht schnell fest, dass die Kraft einer Spule mit Eisenkern von mehreren Faktoren abhängt. Ein Blick in die Formel-Theorie verriet mir, dass die Anzahl der Windungen und die Stromstärke die Stärke des Magnetfelds beeinflussen. Außerdem ist ein möglichst geringer Luftspalt zum Fahrweg wichtig.
Leider waren mehrere gekaufte Elektromagnete viel zu schwach für meine Zwecke. So begann ich selber entsprechende Spulen zu wickeln. Der erste Versuch war wiederum ernüchternd, da ich mich für sogenannten Alu-Backlackdraht entschied. Dieser Draht ist mit einem Lack beschichtet, der sich verklebt, wenn er erhitzt wird. Nach dem Abkühlen entsteht dann eine recht feste Verbindung, was auch richtig gut funktionierte. Allerdings waren der elektrische Widerstand zu hoch und der Lack zu dick, so dass nur verhältnismäßig wenig Windungen auf den Eisenkern passten. Das resultierende Magnetfeld war zu schwach. Im Endeffekt baute ich Spulen aus Kupferlackdraht mit einem Eisenkern aus einer Gewindestange. Der Kupferdraht war außerdem noch etwas dicker als der Aludraht, was einen höheren Stromfluss zuließ. Diese Variante erwies sich als vielversprechend und ich wickelte 20 Kupferspulen.

Abbildung 3: Fahrweg mit Fahrzeug
Das Fahrzeug selbst baute ich aus MDF-Holz. An einem Aluprofil befestigte ich dann die Elektromagneten. Abbildung 2 und 3 zeigen den finalen Aufbau. Ein erster statischer Testlauf offenbarte, dass die Magnete stark genug sind, um das Fahrzeug an der Schiene zu halten. Ich vergrößerte den Luftspalt auf 1-2 mm, indem ich einen Karton zwischen Magnet und Schiene einfügte. Auch auf diese Distanz war die magnetische Kraft groß genug, um das Fahrzeug zu halten. Einziger Nachteil war der hohe Leistungsbedarf. Rund 120 W waren für den Betrieb der Spulen notwendig, was sich auch in entsprechender Wärmeentwicklung niederschlug.
Als nächstes musste der schwierigste Part in Angriff genommen werden: die Elektronik. Da meine Kenntnisse auf dem Gebiet doch eher rudimentär waren, ging ich das Thema recht naiv an. Die Idee war die Elektromagnet anzuschalten, wenn das Fahrzeug nach unten „fällt“ – also sich der Abstand zur Schiene vergrößert. Umgekehrt sollten die Magneten ausgeschaltet werden, wenn der Abstand zu gering wurde. Bis hierhin stimmte mein Verständnis, denn beim Transrapid funktioniert es ebenso; was ich jedoch erst später nach einigen misslungenen Versuchen verstand, war folgender Effekt: Wenn der Elektromagnet eingeschaltet wird, verhindert die Induktivität der Spule den Stromaufbau. Das heißt im ersten Moment nach dem Anschalten fließt noch nahezu kein Strom durch den Draht, und die Kraft ist nicht voll aufgebaut. Da das Fahrzeug bereits eine Abwärtsbewegung ausübt und die Elektromagnete in diesem Moment noch keine Kraft ausüben, fällt das Fahrzeug von der Schiene. Der Luftspalt zwischen Magnet und Schiene ist dann schließlich zu groß und es gibt keine Möglichkeit mehr das Fahrzeug schweben zu lassen.
Die von mir entwickelte Schaltung nutzte einen sogenannten Zweipunktregler. Der Regler ist für das hochdynamische System jedoch zu träge, da er nur „an“ und „aus“ kennt – ein statischer Wert dazwischen kann nicht eingestellt werden. Dies äußerte sich dann darin, dass das ganze Fahrzeug ganz kurz schwebte und dann stark ratterte (Aufschwingen des Regelkreises), bis es von der Schiene abfiel. Ich lernte, dass es für das geschilderte Problem regelungstechnische Lösungen gibt. Da die Zeit leider schon recht weit fortgeschritten war und ich kein großes Risiko mehr eingehen wollte, versuchte ich das Schwebeprinzip an einem einfacheren Aufbau umzusetzen.
Schwebende Kugel
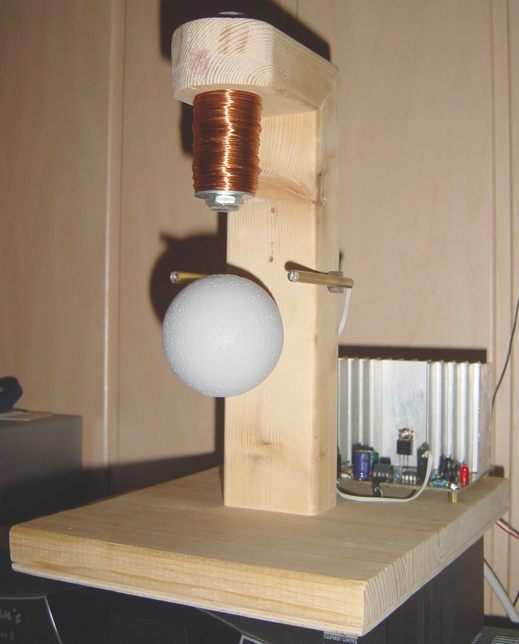
Modell schwebende Kugel
Ich besorgte mir daraufhin Schaltpläne für den Versuch „Schwebende Kugel“. Bei diesem wird eine Metallkugel unter einem Elektromagneten schweben gelassen. Die erste Schaltung funktionierte leider wieder nicht. Meine geringen Fachkenntnisse erlaubten es mir auch nicht, einen besonderen Fehler zu finden. Deshalb baute ich eine weitere Schaltung auf. Die Vorlage hierzu fand ich wiederum im Internet. Glücklicherweise lief dieser Aufbau so wie er sollte. Ich optimierte noch ein paar Details der Schaltung und konstruierte einen soliden mechanischen Aufbau. Die Platine wurde dann mit einfachen Mitteln belichtet und geätzt. Ich war sehr glücklich, dass sich schließlich endlich ein Erfolg einstellte. Der Unterschied dieser komplexeren Schaltung zu meiner einfacheren Variante war folgender: Statt eines „dummen“ Zweipunktreglers kommt ein intelligenter PD-Regler zum Einsatz. Dieser steuert mit einem proportionalen (P) Anteil den Abstand des Luftspaltes. Verändert sich der Luftspalt, setzt zusätzlich der differentielle (D) Anteil des Reglers ein. Dieser erkennt aus der zeitlichen Ableitung des Luftspaltes bereits äußerst kleine Bewegungen und steuert den Elektromagnet schneller an. Dies ist der besondere Trick, den durch die Induktivität verzögerten Stromaufbau zu kompensieren.
Zum Schluss baute ich in eine Styroporkugel einen starken Neodym-Magneten ein. Damit besaß ich eine sehr leichte Kugel die magnetisch sehr gut angezogen wurde. Mit einem Luftspalt zwischen Magnet und Kugel von etwa 3-4 cm konnte schließlich ein toller Effekt erzielt werden.
Fazit
Trotz des wirklich sehr hohen Aufwands den ich auf mich nahm, konnte ich vieles lernen. Die praktischen Arbeiten haben ebenfalls Spaß gemacht. Obwohl ich mein Ziel nicht ganz erreichte, war ich dennoch zufrieden. Für mich wäre es sicher eine gute Sache gewesen, wenn die Schule mehr Möglichkeiten für eigene Projekte geboten hätte – gerne auch in ganz anderen Bereichen. Denn mit persönlichem Interesse und praktischem Bezug, setzt ein viel stärkerer Ehrgeiz ein, sich mit einem Thema zu befassen, als es der reine Frontalunterricht vermag!
Download der Langfassung: Transrapid – Bau eines Modells
Nachtrag 2015
Rückblickend kann ich zehn Jahre später feststellen, dass die Aufgabe die ich mir stellte, selbst mit einem Elektrotechnik-Studium äußerst herausfordernd ist. Ohne die nötigen theoretischen Grundlagen in der Schaltungsentwicklung und der Regelungstechnik – ganz zu schweigen vom unabdingbaren mathematischen Wissen – ist es kaum möglich ein funktionsfähiges Modell des Transrapids von Grund auf zu entwickeln. Ich würde jetzt sagen, dass der gesamte Aufbau vom Umfang eine Diplom-/Masterarbeit füllen könnte. Dennoch war die Arbeit eine tolle Erfahrung, auch wenn der Weg zum Ziel damals wohl mehr über try and error lief 😉
Sollte ich eines Tages die Zeit und die Muße finden, will ich die Schaltung der Schwebenden Kugel nochmals viermal aufbauen und an das Fahrzeug-Modell anschließen (im Fahrzeug-Modell sind die Spulen in vier Blöcke unterteilt, um die zwei Achsen separat zu steuern). Es wäre dann der letzte Schritt, der damals gefehlt hat, ein funktionsfähiges Modell zu bauen. Ich schätze die Chancen durchaus positiv ein, dass es funktionieren könnte!